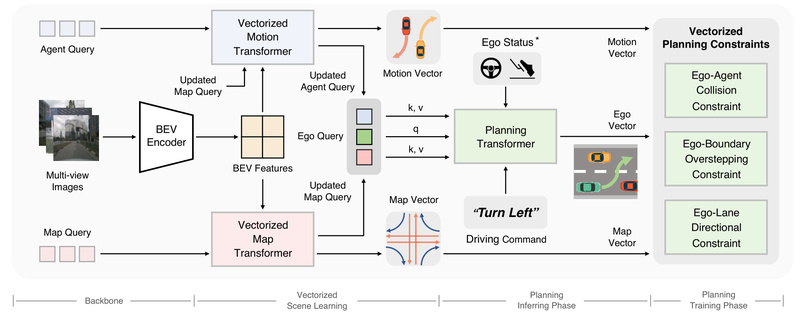
End-to-end autonomous driving systems promise a streamlined alternative to traditional modular pipelines—where perception, prediction, and planning are handled by separate…
End-to-end autonomous driving systems promise a streamlined alternative to traditional modular pipelines—where perception, prediction, and planning are handled by separate…
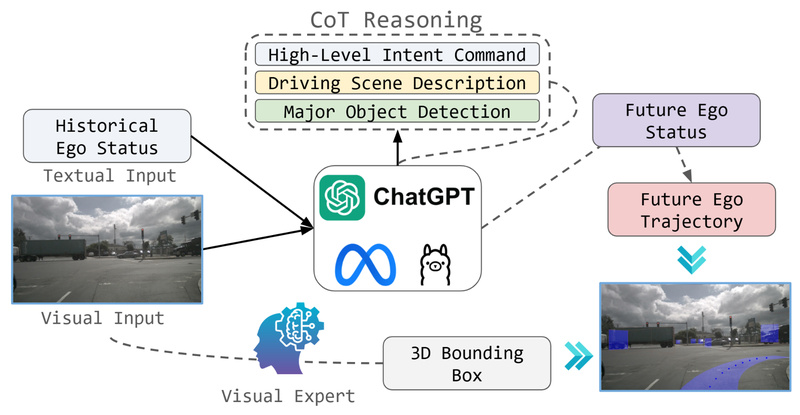
Autonomous driving research has long been bottlenecked by the need for massive datasets, expensive compute infrastructure, and proprietary end-to-end frameworks.…
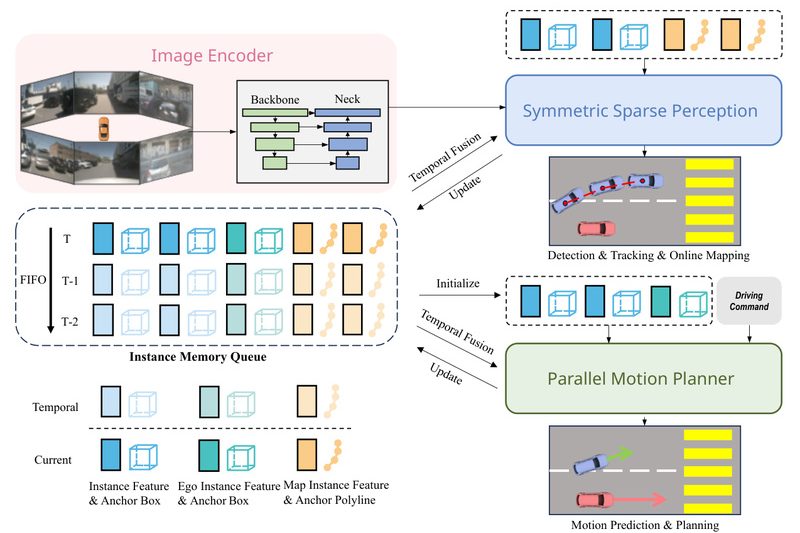
Autonomous driving systems must balance accuracy, safety, and real-time performance. Traditional approaches often rely on dense rasterized representations of the…