End-to-end autonomous driving systems promise a streamlined alternative to traditional modular pipelines—where perception, prediction, and planning are handled by separate…
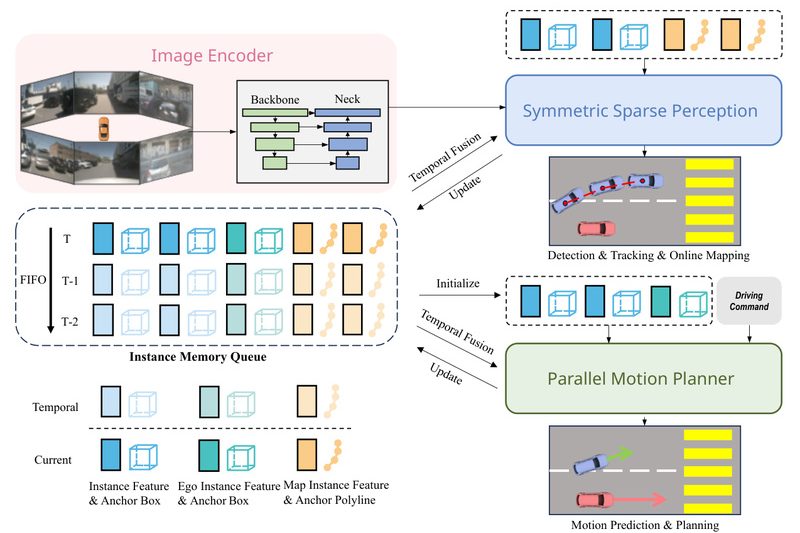
End-to-end autonomous driving systems promise a streamlined alternative to traditional modular pipelines—where perception, prediction, and planning are handled by separate…
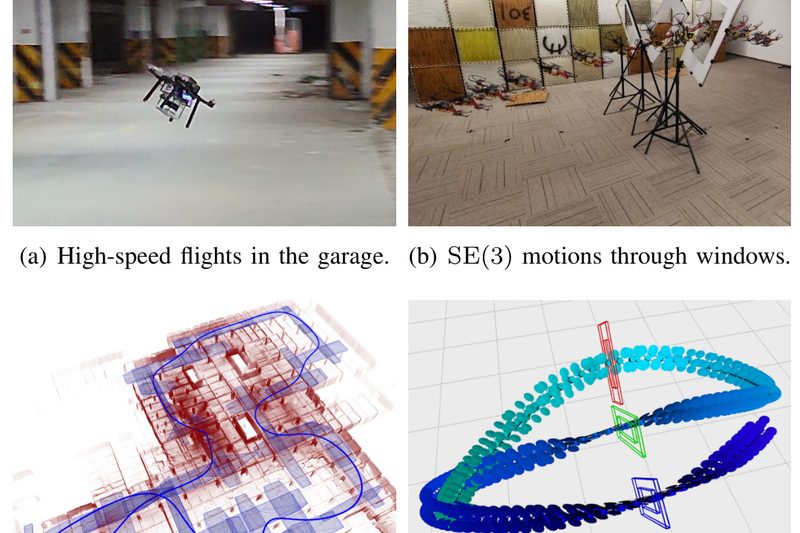
Autonomous multicopters—whether used in drone racing, delivery, inspection, or swarm coordination—face a persistent challenge: generating trajectories that are simultaneously smooth,…