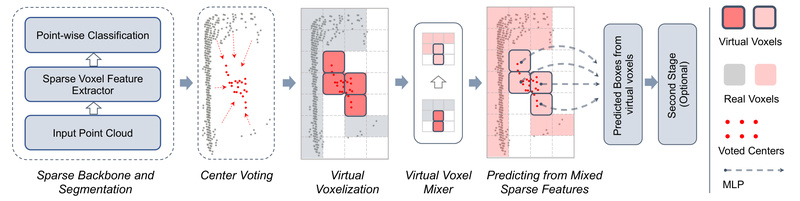
Autonomous driving systems demand robust, real-time perception under all environmental conditions—but traditional deep learning models struggle with the high computational…
Autonomous driving systems demand robust, real-time perception under all environmental conditions—but traditional deep learning models struggle with the high computational…
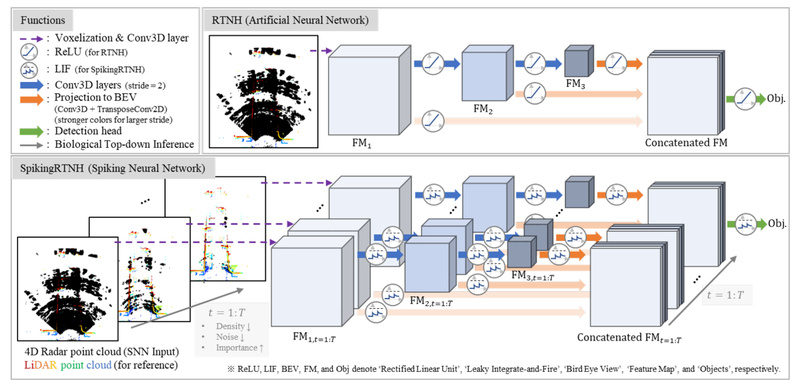
For engineers and technical decision-makers building perception stacks in autonomous driving, robotics, or 3D scene understanding, accurately detecting objects from…
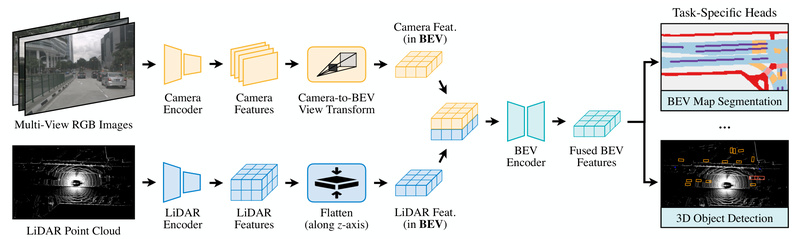
Building reliable perception systems for autonomous driving demands more than just collecting data from cameras and LiDARs—it requires intelligently fusing…