Validating autonomous driving systems (ADS) in realistic, complex urban environments is notoriously difficult. Real-world testing is expensive, risky, and often impractical for edge cases. Traditional simulators may lack the fidelity, interactivity, or scalability needed for meaningful evaluation—especially over long durations or across diverse traffic scenarios.
Enter LimSim Series: an open-source, closed-loop simulation platform purpose-built for the rapid validation and iterative improvement of autonomous driving systems. Unlike generic simulators, LimSim Series combines long-term traffic simulation, human-like background vehicle behaviors, and multi-scenario urban road support—all while offering built-in evaluation metrics and seamless integration with industry-standard tools like SUMO and CARLA.
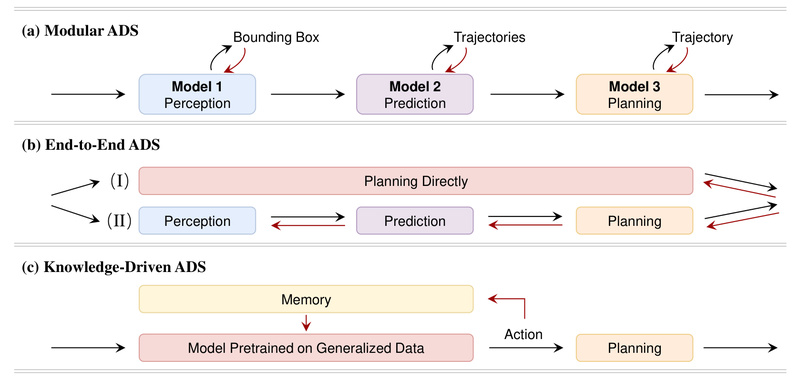
Whether you’re developing a modular perception-planning-control pipeline, an end-to-end driving model, or even a vision-language-model (VLM)-based agent, LimSim Series provides a reproducible, controllable, and insightful sandbox to test, debug, and refine your system before deploying it on real roads.
Why LimSim Series Stands Out
Designed for Real-World Validation Challenges
The LimSim Series directly addresses three critical pain points in ADS development:
- Balancing realism and efficiency: High-fidelity simulation often comes at the cost of speed and scalability. LimSim introduces the Area of Interest (AoI) concept to focus computational resources only where needed—around the ego vehicle—without sacrificing realism elsewhere.
- Bridging functionality and practicality: Many simulators are either too academic or too rigid for rapid prototyping. LimSim offers user-friendly interfaces, pre-built baseline algorithms, and straightforward Python APIs that lower the barrier to entry.
- Lack of comprehensive evaluation: It’s not enough to see if your ADS “works.” You need to know why it fails. LimSim provides multi-dimensional evaluation metrics that automatically extract key scenarios and performance insights after simulation runs.
Core Capabilities That Deliver Real Value
- Long-term simulation: Traffic flows are generated over extended periods using realistic demand and route planning, enabling stress-testing of ADS under sustained operation.
- Diverse traffic behaviors: Background vehicles exhibit heterogeneous, human-like driving styles—no more robotic, uniform traffic patterns.
- Interactive scenarios: Vehicles within the AoI are actively controlled to create sophisticated interactions (e.g., cut-ins, merges, jaywalking responses), mimicking real urban dynamics.
- Multi-scenario road support: From signalized intersections and roundabouts to freeways and overpasses, LimSim handles a wide range of real-world road geometries.
- Built-in evaluation & logging: After a simulation run, LimSim automatically generates log reports and flags critical scenarios for deeper analysis.
Ideal Use Cases for Researchers and Engineers
LimSim Series is especially powerful in the following contexts:
- Testing modular ADS stacks: Validate perception, prediction, planning, and control modules in a unified, closed-loop environment.
- Evaluating end-to-end or VLM-based driving agents: With the release of LimSim++, the platform now supports multimodal large language models (MLLMs) as driving agents, enabling novel research in knowledge-driven autonomy.
- Replaying and analyzing edge cases: Use the replay feature (
ReplayExample.py) to investigate specific scenarios, debug failures, or benchmark improvements. - Long-duration urban traffic studies: Simulate hours of continuous urban driving with evolving traffic patterns—ideal for testing robustness and system drift.
The platform is tailored for teams that need fast iteration cycles without sacrificing simulation realism.
Getting Started Is Straightforward
LimSim prioritizes accessibility:
-
Prerequisites:
- Python 3.9–3.11
- SUMO ≥ 1.15.0
-
Installation:
git clone https://github.com/PJLab-ADG/LimSim.git cd LimSim pip install -r requirements.txt
-
Run Key Examples:
- Real-time ego simulation:
python ModelExample.py - Scenario replay:
python ReplayExample.py
- Real-time ego simulation:
A cross-platform graphical user interface (GUI)—built with DearPyGUI—provides real-time visualization of road networks, vehicle states, and simulation progress, making it easy to monitor and interact with ongoing runs.
Integration, Compatibility, and Practical Considerations
LimSim is designed to work within existing autonomous driving workflows:
- Co-simulation support: Fully compatible with SUMO and CARLA, ensuring synchronized vehicle states across all three platforms.
- Map flexibility:
- Native support for standard SUMO road networks.
- LimSimLight (as of September 2024) can parse OpenDRIVE map files using a new self-developed engine.
- Compatible with CitySim datasets (
freewayB,Expressway_A), though these require manual download due to licensing.
Limitations to Note
- External dependencies: Requires SUMO for core traffic simulation; CARLA for high-fidelity rendering (optional).
- Map assets: Some advanced road networks (e.g., CitySim) are not included in the repo and must be obtained separately.
- License: Released under GNU GPL v3.0, which may affect commercial deployment—review licensing terms if integrating into proprietary systems.
Despite these constraints, LimSim’s modular design and open architecture make it highly adaptable for academic and industrial R&D.
Summary
LimSim Series fills a critical gap in the autonomous driving validation toolkit by offering a realistic, scalable, and evaluable simulation environment tailored to the complexities of urban traffic. Its combination of long-term simulation, interactive agent behaviors, multi-scenario support, and built-in analytics empowers teams to iterate faster, debug smarter, and validate more thoroughly.
For researchers and engineers working on next-generation ADS—whether rule-based, end-to-end, or LLM-augmented—LimSim Series provides a practical, open-source foundation to accelerate development with confidence.